|
Koya Sakamoto I'm a PhD student at the University of Tokyo, under the supervision of Prof. Yusuke Iwasawa and Prof. Yutaka Matsuo. I received my master's degree from Kyoto University, where I was fortunate to be supervised by Prof. Shin Ishii and Dr. Motoaki Kawanabe. Previously, I completed my bachelor's degree, also at Kyoto University, advised by Prof. Hidetoshi Shimodaira. My research connects language, vision, and 3D perception — including language-goal aerial navigation, embodied question answering, and city-scale 3D language fields. I'm broadly interested in agents that perceive, reason about, and act in the physical world. koya DOT sakamoto AT weblab DOT t DOT u-tokyo DOT ac DOT jp / CV / Scholar / Github / Twitter / LinkedIn |
|
Research |

|
NavWAM: A Navigation World Action Model for Goal-Conditioned Visual Navigation
Daichi Azuma, Taiki Miyanishi, Koya Sakamoto, Shuhei Kurita, Yaonan Zhu, Petr Khrapchenkov, Motoaki Kawanabe, Yusuke Iwasawa, Yutaka Matsuo preprint, 2026 arXiv / project / |
|
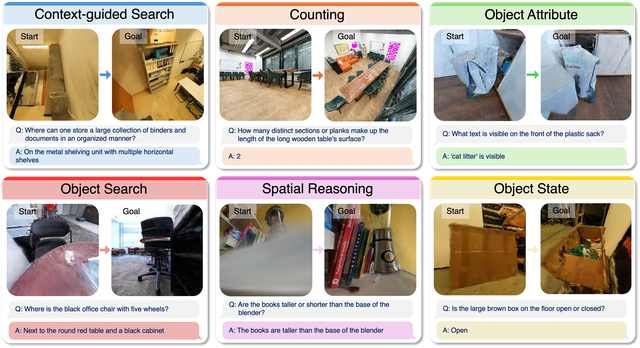
E3VS-Bench: A Benchmark for Viewpoint-Dependent Active Perception in 3D Gaussian Splatting Scenes
Koya Sakamoto, Taiki Miyanishi, Daichi Azuma, Shuhei Kurita, Shu Morikuni, Naoya Chiba, Motoaki Kawanabe, Yusuke Iwasawa, Yutaka Matsuo European Conference on Computer Vision (ECCV 2026), 2026 arXiv / project / code |
|
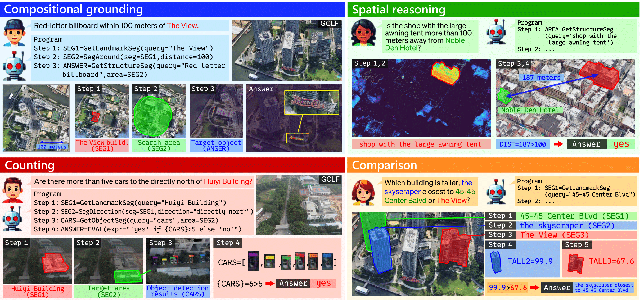
GeoProg3D: Compositional Visual Reasoning for City-Scale 3D Language Fields
Shunsuke Yasuki, Taiki Miyanishi, Nakamasa Inoue, Shuhei Kurita, Koya Sakamoto, Daichi Azuma, Masato Taki, Yutaka Matsuo IEEE/CVF International Conference on Computer Vision (ICCV), 2025 arXiv / project / code |
|
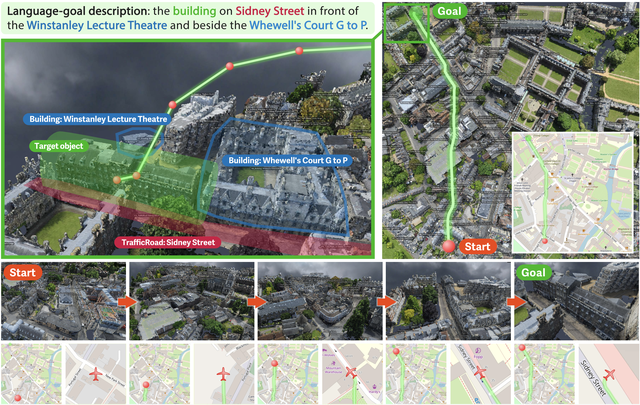
CityNav: Language-Goal Aerial Navigation Dataset with Geographic Information
Jungdae Lee, Taiki Miyanishi, Shuhei Kurita, Koya Sakamoto, Daichi Azuma, Yutaka Matsuo, Nakamasa Inoue IEEE/CVF International Conference on Computer Vision (ICCV), 2025 arXiv / project / code |
|
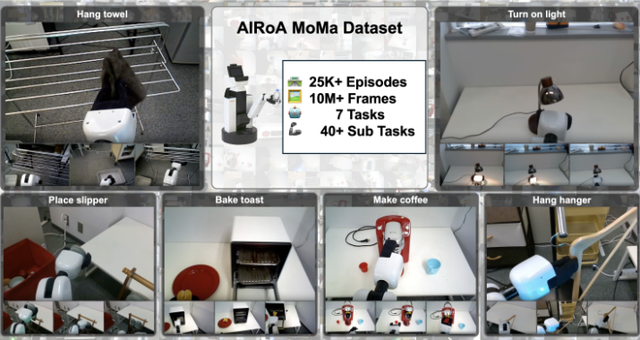
AIRoA MoMa Dataset: A Large-Scale Hierarchical Dataset for Mobile Manipulation
Ryosuke Takanami, Petr Khrapchenkov, Shu Morikuni, Jumpei Arima, Yuta Takaba, Shunsuke Maeda, Takuya Okubo, Genki Sano, Satoshi Sekioka, Aoi Kadoya, Motonari Kambara, Naoya Nishiura, Haruto Suzuki, Takanori Yoshimoto, Koya Sakamoto, Shinnosuke Ono, Hu Yang, Daichi Yashima, Aoi Horo, Tomohiro Motoda, Kensuke Chiyoma, Hiroshi Ito, Koki Fukuda, Akihito Goto, Kazumi Morinaga, Yuya Ikeda, Riko Kawada, Masaki Yoshikawa, Norio Kosuge, Yuki Noguchi, Kei Ota, Tatsuya Matsushima, Yusuke Iwasawa, Yutaka Matsuo, Tetsuya Ogata arXiv preprint, 2025 arXiv / dataset |
|
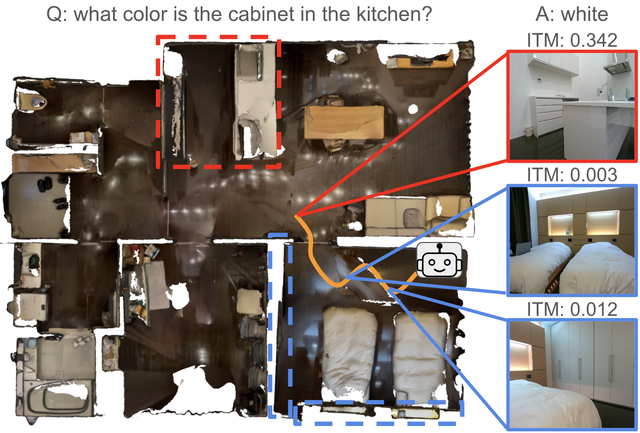
Map-based Modular Approach for Zero-shot Embodied Question Answering
Koya Sakamoto, Daichi Azuma, Taiki Miyanishi, Shuhei Kurita, Motoaki Kawanabe IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024 arXiv / project / code |
|
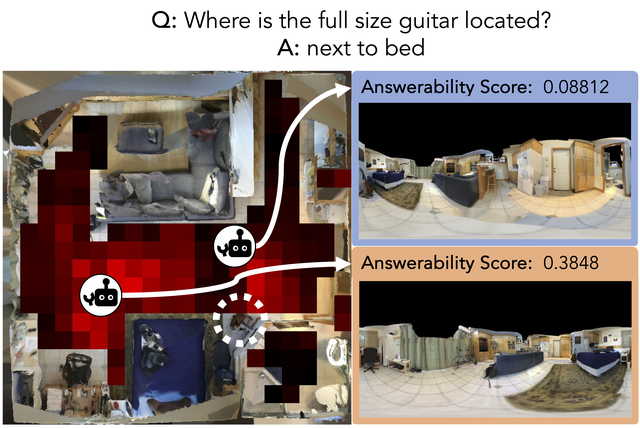
Answerability Fields: Answerable Location Estimation via Diffusion Models
Daichi Azuma, Taiki Miyanishi, Shuhei Kurita, Koya Sakamoto, Motoaki Kawanabe IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024 arXiv |
|
Adapted from Jon Barron's source code. |